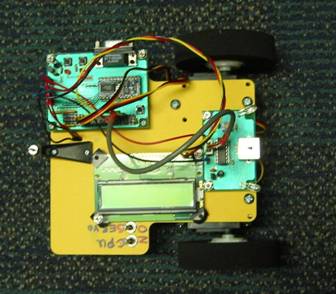
Carpet Rover
Controlled using a Basic Stamp 2SX microcontroller. Infrared sensors at the front detect obstacles, and an lcd display shows the status of the robot. To drive the wheels, standard rc servos were taken apart and modified to allow continuous rotation. |
|